






































































































































































































































-
下载中心

 欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
 欢迎登录航测云 一站式无人机管家服务
欢迎登录航测云 一站式无人机管家服务 华测CORS覆盖范围查询
华测CORS覆盖范围查询  伙伴培训学习平台
伙伴培训学习平台 -
教学视频
欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
欢迎登录航测云 一站式无人机管家服务 华测CORS覆盖范围查询 伙伴培训学习平台
-
服务支持
欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
欢迎登录航测云 一站式无人机管家服务 华测CORS覆盖范围查询 伙伴培训学习平台
-
售前问答
欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
欢迎登录航测云 一站式无人机管家服务 华测CORS覆盖范围查询 伙伴培训学习平台
-
行业无忧
欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
欢迎登录航测云 一站式无人机管家服务 华测CORS覆盖范围查询 伙伴培训学习平台
-
帮助中心
欢迎登录华测云 RTK作业数据云存储,安全便捷,多端并用
欢迎登录航测云 一站式无人机管家服务 华测CORS覆盖范围查询 伙伴培训学习平台
铜陵电力输电处准备试飞华测的固定翼+机载雷达。实现点云数据通道采集和无人机自主飞行线路规划。本次飞行14KM。45基塔。针对本项目计划要求,拟采用无人机载激光雷达进行作业,实施方案如下:
(1)空域申请
为保障项目顺利进行,在进行作业前,依法依规进行空域申请工作。跟进确定好的区域经纬度坐标信息,明确作业空域范围,将范围以经纬度坐标形式上报至东部战区航管处进行空域申请,在得到许可答复后方可进行飞行作业
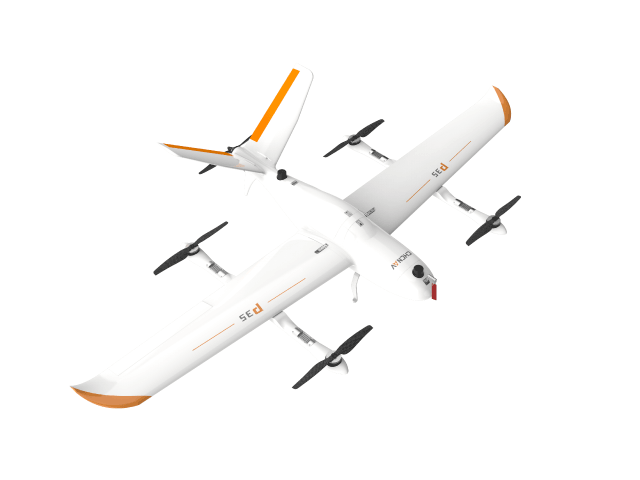
(2)固定翼无人机雷达系统电力通道点云数据采集
本项目预计14.2km通道进行固定翼往返数据采集,飞行高度200m,巡航速度75km/h,飞行时间约60min,地面点密度为60点/平方米,点云精度优于10cm。

在外业选择合适的位置,采用华测H320手簿和华测i70GNSS接收机测量地形点,测量完成后,将三脚基座、辅助量高板与静态RTK (地面站)连接在一起置于三脚架上,放于地形点正上方(整平、对中)后,开始静态数据采集。另外,注意静态RTK覆盖范围,当飞行距离超出时,需要重新打点重新设置。
无人机激光雷达系统设置
将华测AS1300HL激光与X-C纯电动固定翼飞机连接成一体,设置作业参数包括:激光发射频率、飞行高度、视场角、扫描线速等参数,;依据飞行高度和速度设置相机触发间隔等相机参数;
无人机飞行方式
本次项目采用纯电固定翼无人机,整体飞行方式采用自动仿地飞行,飞行高度距电力塔约100-150m。
一个架次飞行距离约20-30km,并且双向采集数据。
(3)内业数据处理
通过分析软件点云数据分类切档,输出交跨、树障、工况模拟报告和台账信息等关键数据;
激光数据解算
华测导航Copre软件支持现场点云解算,可以在每次飞行完成后,快速解算点云数据,查看测区范围。同时,根据飞行时采集的照片信息对点云赋色。

正射影像数据
根据单相机采集的正射照片,在Pix4D中给予投影方式、中央子午线等参数,生成正射影像数据。
地形数据
本次项目最终成果需要应用于电力线管控平台之上,对地形数据精度要在10m以下,测区范围的地形数据使用SRTM数据。
电力塔成果
基于激光雷达生成的点云数据,加载进拓维思软件中,并且进行划档、分类、删除噪点等预处理过程。之后,生成一些电力成果,有相间距、塔高、塔基位置、最小查找距离、当前工况检测、覆冰工况检测、风偏工况检测、高温工况检测、交叉跨越检测、树木倒伏分析等成果输出。


交叉跨越检测报告示例
检测缺陷表示例

台账信息表示例
 相关产品
相关产品
 架空输电线路自主巡检
架空输电线路自主巡检


